Multi-Robot Collaborative Construction
This project investigates cooperative behaviors for multiple robots working on construction-oriented tasks. It focuses on task decomposition, coordination logic, and robust execution under shared workspace constraints.
Project Goal
Develop and evaluate a collaboration framework where multiple robots can coordinate task order, avoid conflicts, and maintain execution progress for structured assembly or construction scenarios.
What I Did / My Contribution
- Designed multi-robot task allocation logic for cooperative construction steps.
- Evaluated collision-aware coordination and timing synchronization strategies.
- Built simulation scenarios to compare cooperative vs. single-robot throughput.
- Analyzed bottlenecks and summarized design recommendations for scalability.
Methods / Workflow
- Define construction task graph and resource dependencies.
- Assign tasks across robot agents based on capability and timing constraints.
- Simulate coordinated execution with conflict detection and resolution rules.
- Review performance metrics and iterate scheduling/coordination policies.
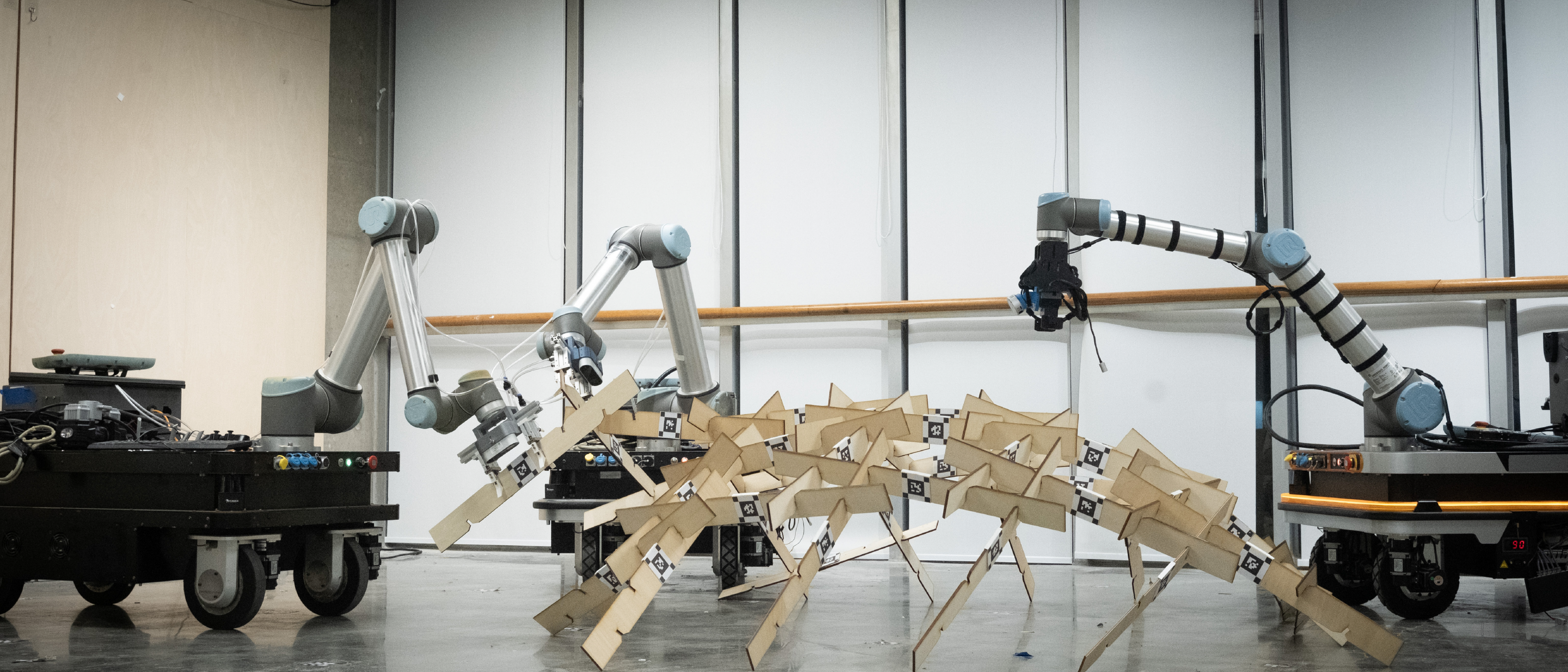
Images / Videos / Simulation
Results / Takeaways
The collaborative workflow showed stronger efficiency than isolated operation in structured tasks. One major takeaway was that explicit task dependencies and simple conflict rules can provide reliable baseline coordination.
Tools / Skills
Multi-Robot Systems, Coordination, Task Allocation, Simulation, Computational Design